DMD0517

CTDYNVEL - CTRIO Run Dynamic Velocity Mode
The CTRIO Run Dynamic Velocity Mode (CTDYNVEL) instruction is used to load and run one of the preconfigured Dynamic Velocity Profiles in the System Configuration for the CTRIO module and put the Pulse Output Device into the Dynamic Velocity Mode, allowing successive velocities to be easily commanded. Once in Dynamic Velocity Mode, velocities are commanded by simply changing the Frequency value. The velocity changes will be executed using the parameters defined by the loaded pulse profile. The CTDYNVEL instruction can be used with both the CTRIO and CTRIO2 modules.

Parameters:
Note: Use the F9 key or click the 'three dot box' at the right edge of the parameter field to open the Default Element Selection Tool (the Element Picker or the Element Browser) or use the Down-Arrow key (Auto-Complete) on any parameter field to see a complete list of the memory locations that are valid for that parameter of the instruction.
Pulse Output Device - selects which preconfigured CTRIO Pulse Output device to use. Before this instruction can select a Pulse Output device, a CTRIO Device must be configured with at least one of its output channels setup for Pulse / Direction or CW / CCW pulse output mode.
no devices available - indicates that there are no CTRIO Pulse Output devices that have been configured that can perform this instruction.
create module - will open the Create New Module Configuration dialog where a CTRIO Module can be created and then a CTRIO Pulse Output device can then be configured.
Pulse Output Structure - this field displays the name of the Pulse Output Structure that will be used by this instruction. This structure was created when the CTRIO module was configured during the Module Configuration phase.
Dynamic Velocity File Number - selects which Dynamic Velocity Profile to run. The profile can be specified in one of the following three ways:
-
Fixed File - displays a list of the Dynamic Velocity Profiles that were read from the CTRIO module during the Module Configuration phase. Select the desired profile from the list. Available Profiles:
PROFILE
(Silver text indicates the profile cannot be used with CTDYNVEL)
CTRIO
CTRIO2
Symmetrical S-Curve
Dynamic Positioning
Dynamic Velocity
Yes
Yes
Free Form
Dynamic Positioning Plus (CTRIO2)
Trapezoid Plus (CTRIO2)
-
Variable File Number - specifies a memory location where the Pulse Profile number resides. This can be any readable numeric location.
-
Constant File Number - specify the Dynamic Velocity Profile number as a constant number from 1 to 255.
Frequency - specifies the Frequency for the Dynamic Velocity Profile. This can be any positive or negative constant value in the range of 0 to 25000 for the CTRIO, or the range of 0 to 250000 for the CTRIO2, or any readable numeric location.
The On Success and On Error parameters specify what action to perform when this instruction completes. You do not have to use the same type of selection for both On Success and On Error.
If the Set Bit selection is used for either On Success or On Error, the specified BIT location will be SET OFF when the instruction is first enabled and will remain OFF until the instruction completes. Once complete, the appropriate Success or Error bit location ON. The specified Bit location is enabled with a SET (Latch) operation meaning that it will remain ON even if the input logic for the instruction goes OFF.
If the JMP to Stage selection is used for either On Success or On Error the target Stage must be in the same Program code-block as this instruction, you cannot specify a target Stage that exists in a different Program code-block. When the operation finishes, the target Stage will be enabled the same way as a standalone Jump to Stage (JMP) instruction would do it. The JMP to Stage option will only be available if this instruction is placed in a Program code-block.
On Success selects which of the following actions to perform if the operation is successful:
- Enable SET Bit then specify any writable bit location.
- Enable JMP to Stage then specify any
Stage number from S0 to S127 in the current Program code-block.
On Error selects which of
the following actions to perform if the operation is unsuccessful:
- Enable SET Bit then specify writable bit location.
- Enable JMP to Stage then specify any Stage number from S0 to S127 in the current Program code-block.
If either the On Success or On Error selections are set to JMP to Stage, Automatically create the SG box for any NEW stage number will be enabled which will automatically create any target stage that does not already exist.
- Below this rung will create the new target stage on a new rung following this instruction.
- At end of code-block will create the new target stage as the last rung of this Program.
Note: On Success is not indicated upon the every Frequency value change. While the E/R (Enable / Reset) input is ON, the Pulse Output device is considered in the "Dynamic Velocity Mode". When the E/R (Enable / Reset) input goes OFF, this is when On Success will be indicated.
Note: any time the On Error condition occurs, the CTRIO generates an Error Code that can be read in the <Module Name>.ErrorCode (Module Name is the name assigned to the CTRIO in the Module Configuration). The List of Error Code values (in decimal) follows:
Instruction Inputs:

The first input (E/R) in the Enable / Reset input. When this input logic is ON the Pulse Output Device is placed in the "Dynamic Velocity Mode", the specified Dynamic Velocity File Number will be loaded, the current position value will be set to 0 (e.g. .OutputPosition = 0) and the Output will be enabled (.OutputEnabled = ON).
The second input (SUS) is the Suspend input. When SUS input comes ON the CTRIO will abruptly stop emitting output pulses. When SUS input returns to OFF the CTRIO will abruptly start emitting the remaining output pulses.

Status Display:
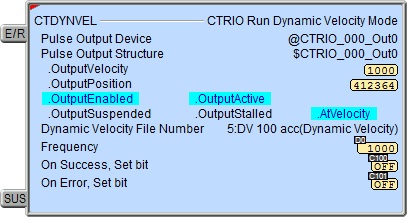
The Status display of the instruction shows Values: .OutputVelocity, .OutputPosition, Frequency, and Dynamic Velocity File Number, and Highlights: .OutputEnabled, .OutputActive, .OutputSuspended, .OutputStalled, and .AtVelocity bits.
The red triangle in the upper left corner of the status display indicates this is a Fully Asynchronous instruction.
CTRIO Structure Field Care-Abouts:
The following is a list of the"dot" fields of the CTRIO structure that are programmatically used with the CTRIO Run Dynamic Velocity Mode (CTDYNVEL) instruction. To see a complete listing of all CTRIO structures and members, go to the Project Browser --> Configuration --> Memory --> I/O --> Specialty.
COLOR KEY
Blue: CTRIO Input
Maroon: CTRIO Output
Black: CTRIO Module
Silver: Not used for this instruction
Note: The red "x" is the digit 0, 1, 2, or 3.
NOTES:
(1)This structure member only available for CTRIO2 (not CTRIO). For CTRIO this remains zero.
See Also:
CTDYNPOS
- CTRIO Run Dynamic Position Mode
CTDYNVEL
- CTRIO Run Dynamic Velocity Mode
CTPLSADD
- CTRIO2 Add Entry to PLS
CTPLSEDT
- CTRIO2 Edit PLS Entry
CTREGWR -
CTRIO Write Register
CTRUNPOS
- CTRIO Run Position Mode
CTRUNVEL
- CTRIO Run Velocity Mode
CTTBLADD
- CTRIO Add Entry to Preset Table
CTTBLEDT
- CTRIO Edit Preset Table Entry
Example 1 of 2:
Description of a Typical CTRIO Run Dynamic Velocity Mode (CTDYNVEL) Stage Diagram:
This is a stage diagram of a simple sequence control that would run a motor at any number of different velocities.

The Velocity stage puts the CTRIO pulse output in the Dynamic Velocity mode. Once this is complete (OutEn = ON) then the RunVel stage is enabled (not transitioned to). The reason for this is because the Velocity stage must remain enabled to keep the CTRIO pulse output in the Dynamic Velocity mode.
In the RunVel stage exists ladder logic that would write any number of velocity values as needed for the process. When the last velocity has finished, then Done comes on and it transitions to the Stop stage where the Program code block is exited.
Description of a Typical CTRIO Run Dynamic Velocity Mode (CTDYNVEL) Stage Ladder:
This is the ladder equivalent of the above stage diagram that uses the CTDYNVEL instruction which will run a stepper motor attached to the CTRIO's pulse output at any number of specified velocities using a predetermined movement profile.
This example presupposes the existence of the following System Configuration for the CTRIO (PLC --> System Configuration --> Module Configuration(s) --> CTRIO_000 -->):
-
Configure I/O --> Outputs --> Out0 --> Pulse (Step/Dir) or Pulse (CW/CCW).
-
Pulse Profiles --> File 10 --> Dynamic Velocity --> (values for Clockwise Accel Rate, Clockwise Decel Rate, Counter-clockwise Accel Rate & Counter-clockwise Decel Rate).
-
A stepper motor is wired to CTRIO's Output 0 and Output 1.
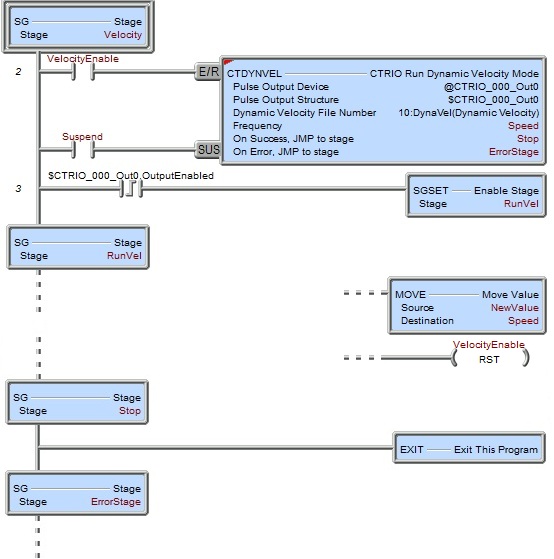
Velocity is the initial stage. This stage must remain enabled during the entire velocity process. Instead of transitioning to the next stage (RunVel), the next stage will merely be enabled. When VelocityEnable is turned ON the following happens:
-
If there is an error then transition is immediately made to the ErrorStage where logic (not shown here) should exist to properly handle and report the error code now stored in $CTRIO_000.ErrorCode.
-
If there is no error the CTRIO's pulse output will be placed in the Dynamic Velocity mode with the parameters specified in the Dynamic Velocity File Number Pulse Profile.
-
The CTRIO's pulse output is enabled ($CTRIO_000_Out0.OutputEnabled = ON).
The VelocityEnable must be reset OFF when all velocities are completed.
Note: Turning VelocityEnable bit OFF will cause the CTRIO output to abruptly stop. Thus it is usually a good idea to write a zero (0) to the CTDYNVEL's Frequency parameter (Speed) before turning VelocityEnable bit OFF.
The CTDYNVEL's SUS (Suspend) is controlled by the Suspend bit. This bit must remain OFF for any given velocity. Turning this bit ON will cause the CTRIO's output to immediately stop. Turning it back OFF will cause the CTRIO's output to abruptly restart.
Once the $CTRIO_000_Out0.OutputEnabled bit has come ON the RunVel stage is enabled (not transitioned to).
In the RunVel stage should exist the ladder logic (not shown here) that would write various velocity values to the Speed variable as the process requires (e.g. using a MOVE instruction to move a value from NewValue to Speed as shown). As soon as a new value is written to the Speed variable, the CTRIO will accelerate/decelerate to the new velocity. When the process is deemed as complete RunVel stage should reset VelocityEnable bit OFF (as shown) observing the cautions in the above Note.
Turning VelocityEnable bit OFF causes the following to happen:
-
The CTRIO pulse output is disabled ($CTRIO_000_Out0.OutputEnabled = OFF).
-
The CTDYNVEL's On Success transitions to the Stop stage.
The Stop stage merely exits this Program code block.
Example 2 of 2:
