Topic: DMD0139

PIDINIT - Set PID Tuning Constants
The Set PID Tuning Constants (PIDINIT) instruction is used to initialize the runtime parameters of the specified PID loop.
Note: to use variables to set the tuning constants use the Move Value instruction referencing the individual PID structure members, for example MyPID.Gain, MyPID.SampleTime, etc..
Note: at the conclusion of a successful Auto-tune process the user can elect to automatically create a PIDINIT instruction.
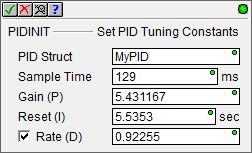
Parameters:
Note: Use the F9 key or click the 'three dot box' at the right edge of the parameter field to open the Default Element Selection Tool (the Element Picker or the Element Browser) or use the Down-Arrow key (Auto-Complete) on any parameter field to see a complete list of the memory locations that are valid for that parameter of the instruction.
PID Struct - specifies the PID Loop structure which will receive the tuning values. This can be any existing PID Loop structure.
Sample Time (ms) - specifies the Sample Time (in milliseconds). This can be any constant value greater than or equal to 1.
Gain (P) - specifies the Gain (Proportional) value. This can be any constant value.
Reset (I) - specifies the Reset (Integral) value. This can be any constant value.
Rate (D) - if enabled, specifies the Reset (Derivative) value. This can be any constant value.
Eliminating Proportional, Integral or Derivative Action
It is not always necessary to run a full three mode PID control loop. Many loops require only the PI terms or just the P term. Parts of the PID equation may be eliminated by choosing appropriate values for the gain, reset and rate, thereby yielding a P, PI, PD, I and even an ID and a D loop.
Eliminating Gain (Proportional) Action - Although rarely done, the effect of proportional term on the output
may be eliminated by setting the value to 0.
Eliminating Reset (Integral) Action - The effect of integral action on the output may be eliminated
by setting the Reset value to 0.
Eliminating Rate (Derivative) Action - The effect of derivative action on the output may be eliminated by setting the value to 0.
Status Display:
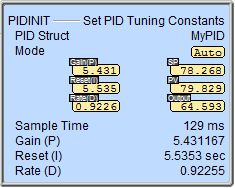
When the ladder status is ON (Debug -> All Status On) the Set PID Tuning Constants instruction displays the referenced PID loop's most pertinent values.
See Also:
DEADBAND - Set Outside Deadband
INTEGRAT - Integrate Over Time
PIDINIT - Set PID Tuning Constants
TIMEPROP - Time Proportional Control
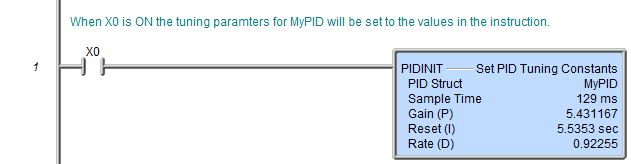
Rung Example: