Topic: DMD0137

FILTER - First Order Filter
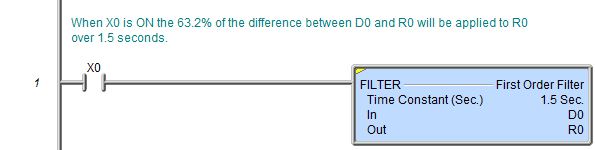
The First Order Filter (FILTER) instruction performs a continuous filtering operation on the input value. This operation applies 63.2% of the difference between the In value and the Out value to the Out value over the duration of the Time Constant. Filters are used to dampen or slow down the changes to the In value to produce a more linear Out value.
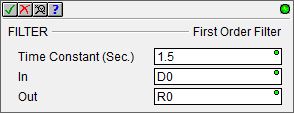
Parameters:
Note: Use the F9 key or click the 'three dot box' at the right edge of the parameter field to open the Default Element Selection Tool (the Element Picker or the Element Browser) or use the Down-Arrow key (Auto-Complete) on any parameter field to see a complete list of the memory locations that are valid for that parameter of the instruction.
Time Constant is the amount of time in seconds over which to apply the filter. This can be any positive constant value or any readable numeric location.
In is the numeric memory location that contains the value to be filtered. This can be any readable numeric location.
Out is the numeric memory location to store the filtered value. This can be any writable numeric Real location.
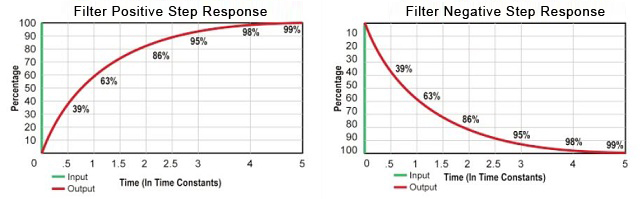
The charts below show the output response to a step input when using the FILTER instruction. At one times the Average Time Constant, 63% of an input change is
achieved at the output. At five times the Average Time Constant value, 100% of the input change is achieved at the output.
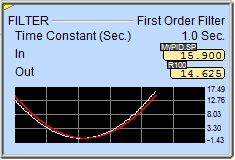
Status Display:
The yellow triangle in the upper left corner indicates the First Order Filter is a Multi-Scan instruction.
When the ladder status is ON (Debug -> All Status On), in addition to the standard status values being displayed, the 1st Order Filter instruction also displays a small trend that shows the instruction's values graphically. To disable the display of the trend go to the View -> Options menu, select the Ladder tab, then uncheck the Show Trend Status selection.
See Also:
DEADBAND - Set Outside Deadband
FILTER - First Order Filter
INTEGRAT - Integrate Over Time
TIMEPROP - Time Proportional Control
Rung Example: