Topic: DMD0135

CLAMP - Limit Range
The Limit Range (CLAMP) instruction is used to constrain a memory location
so that its value is always within a specified range. This is accomplished
by copying the Input value to the Output value using the follow rules:
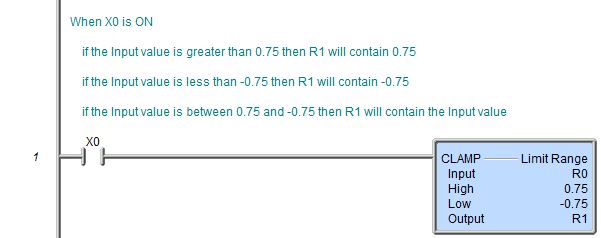
If the Input value is greater than or equal to the High limit, the Output value will be set to the High value.
If the Input value is between the High and Low limits the Output value will be set to the Input value.
If the Input value is less than or equal to the Low limit, the Output value will be set to the Low value.

Parameters:
Note: Use the F9 key or click the 'three dot box' at the right edge of the parameter field to open the Default Element Selection Tool (the Element Picker or the Element Browser) or use the Down-Arrow key (Auto-Complete) on any parameter field to see a complete list of the memory locations that are valid for that parameter of the instruction.
Input is the numeric memory location that contains the value to clamp. This value can be any readable numeric memory location.
High is the maximum allowable value for the Input variable. The High value can be any constant value or any readable numeric memory location.
Low is the minimum allowable value for the Input variable. The Low value can be any constant value, or any readable numeric memory location.
Output is the numeric memory location to store the clamped output value. This can be the same element as the Input parameter. This value can be any writable numeric memory location.
Status Display:
When the ladder status is ON, in addition to the standard status values being displayed, the Limit Range instruction also displays a small trend that shows the instruction's values graphically. To disable the display of the mini-trend go to the View -> Options menu, select the Ladder tab, then uncheck the Show Trend Status selection.

See Also:
CLAMP - Limit Range
DEADBAND - Set Outside Deadband
INTEGRAT - Integrate Over Time
TIMEPROP - Time Proportional Control
Rung Example: