
EDRV FAQ0001 (see also EBC FAQ0015; HA-TADP
FAQ0001; ECOM FAQ0008; ERM FAQ0009; WinPLC FAQ0004; EZ Ethernet
FAQ0011)
07-Feb-2003
Q: Can the MAC address be changed?
A: The MAC address is burned into the ROM of the device and is
set just before it leaves the factory. There is no logical way for any
protocol to change this address. Host Engineering’s range for Ethernet
MAC addresses is 00.E0.62.xx.xx.xx.
However, there was a bug with the old Ether32.EXE program that could change the MAC Address! If you use Ether32.EXE to update the booter using TCP/IP protocol (i.e. use the "/pi" option on the command line), then the MAC Address could be changed by accident!
EDRV FAQ0002 (see also ERM FAQ0010; EBC FAQ0016;
ECOM FAQ0009)
07-Nov-2012
Q: Can ERM Workbench be used to upgrade firmware on other Host
Ethernet devices (e.g. an ECOM)? And if so, how?
A: Older
versions of ERM Workbench (before v2.0) can be used in this manner. If
ERM Workbench is v2.0 or later, then this is not possible; instead NetEdit3 must be used.
If using ERM Workbench earlier than v2.0:
| GS-EDRV Parameter |
Modbus TCP (hex) | Holding Register (zero-base) |
| P0.00 | 0x0000 | 0 |
| P1.00 | 0x0100 | 256 |
| P2.00 | 0x0200 | 512 |
| P3.00 | 0x0300 | 768 |
| P4.00 | 0x0400 | 1024 |
| P5.00 | 0x0500 | 1280 |
| P6.00 | 0x0600 | 1536 |
| P7.00 | 0x0700 | 1792 |
| P8.00 | 0x0800 | 2048 |
| P9.00 | 0x0900 | 2304 |
Example:
The Run command is at GS Param 9-27 which is mapped into 0x900 (2304) + 27 = 2331. Since Modbus Holding Registers are one-based, then +1 = Holding Register 2332.
There are also other Holding Registers that contain information besides the drives parameter list (above). Below is a table showing some specific drive parameters based on the above table as well as some of the extra ones available:
| GS-EDRV Parameter |
Description | Modbus TCP (hex) | Holding Register (one-base) |
| P9.26 | Speed reference | 0x091A | 2331 |
| P9.27 | Run command | 0x091B | 2332 |
| P9.28 | Direction | 0x091C | 2333 |
| P9.29 | External fault | 0x091D | 2334 |
| P9.30 | Fault reset | 0x091E | 2335 |
| P9.31 | Jog | 0x091F | 2336 |
| --- | Status Monitor 1* | 0x2100 | 8449 |
| --- | Status
Monitor 2* |
0x2101 | 8450 |
| --- | Frequency command | 0x2102 | 8451 |
| --- | Output frequency | 0x2103 | 8452 |
| --- | Output current | 0x2104 | 8453 |
| --- | DC bus voltage | 0x2105 | 8454 |
| --- | Output voltage | 0x2106 | 8455 |
| --- | Motor RPM | 0x2107 | 8456 |
| --- | Scale frequency (low) | 0x2108 | 8457 |
| --- | Scale frequency (high) | 0x2109 | 8458 |
| --- | Percent load | 0x210B | 8460 |
| --- | Firmware version | 0x2110 | 8465 |
| --- | Serial comm link health** | 0x21FD | 8705 |
NOTES:
* - See manual for
details for what this means
** - Value of 1
means the serial comm link is good; 0 means bad
EDRV FAQ0004 (see also NetEdit FAQ0003, ERM
FAQ0003, EBC FAQ0006)
09-Sep-2009
Q: NetEdit sees ERM, EBC and EDRV, but ERM Workbench gets error
"ERM not found" when trying to write the configuration to the ERM.
A: Downloading the latest version of ERM Workbench may remedy
this problem; especially if you are using the ERM Workbench Wizard.
You should download at least ERM Workbench v1.1 Build 26. Otherwise
here are some things to try:
EDRV FAQ0005 (see also ERM FAQ0014; EBC FAQ0023;
ECOM FAQ0019; EZ Ethernet FAQ0014)
26-Mar-2003
Q: For my Ethernet network that would exceed 100 meters, is a
standard hub considered a repeater so as to increase the permissible
length?
A: Yes. The maximum distance per 10BaseT cable segment is 100
meters. Repeaters (e.g. hubs, bridges, etc.) extend the distance. Each
cable segment attached to a repeater can be 100 meters. Thus, two
repeaters can gain you a total of 300 meters distance.
EDRV FAQ0006
22-Apr-2003
Q: Can't get the GS-EDRV to talk to my GS2 drive.
A: The most common mistake made here is not having the drive
parameters set properly. Please insure they are set as follows:
|
GS2-43P0 |
DEFAULT |
NEW |
COMMENTS |
|
P 0.00 |
480 |
460 |
Motor Nameplate Voltage Setting |
|
P 0.01 |
5 |
4.8 |
Motor Nameplate Amps Setting |
|
P0.02 |
60 |
60 |
Motor Base frequency |
|
P0.03 |
1750 |
1725 |
Motor base RPM |
|
P0.04 |
1750 |
1725 |
Motor Maximum RPM |
|
P1.00 |
0 |
1 |
Coast to stop |
|
P1.01 |
10 |
20 |
Acceleration time |
|
P2.00 |
0 |
2 |
Volts/Hertz set to fans and pumps |
|
P3.00 |
0 |
3 |
RS485 operation control enabled |
|
P4.00 |
0 |
5 |
RS485 speed reference control |
|
P8.00 |
0 |
3 |
RPM display |
|
P9.00 |
1 |
X(1) |
Communication address (dependent on drive 1-8) |
|
P9.01 |
1 |
1 |
9600 Baud rate |
|
P9.02 |
0 |
5 |
MODBUS RTU 8 data bits, odd parity, 1 stop bit |
EDRV FAQ0007 (see also ECOM 0028; EBC FAQ0033,
ERM FAQ0020, EZ Ethernet FAQ0017; DirectSOFT FAQ0181; DS Data FAQ0088;
SDK FAQ0012; NetEdit FAQ0013)
20-Jul-2018
Q: What Ethernet protocols are used by your products?
A: Refer to chart below:
| Product | Ethernet Protocols | ||||||||||||||
| UDP/IP | IPX | TCP/IP | Raw Ethernet Broadcast (1) | ||||||||||||
| K-seq | DirectNet | ECOM (2) | Koyo Backplane | User Defined Data | Proprietary (1) | K-seq | DirectNet | ECOM (2) | Proprietary (1) | Modbus TCP Master | Modbus TCP Slave | Proprietary (1) | Koyo Backplane | ||
| Hardware | ECOM | Y | Y | Y | Y (3) | Y (4) | Y | Y | Y | Y (5) | |||||
| ECOM100 | Y | Y | Y | Y (3) | Y (4) | Y | Y | Y | Y (6) | Y | Y (5) | ||||
| EBC | Y | Y | |||||||||||||
| EBC100 | Y | Y | Y | ||||||||||||
| ERM | Y (7) | Y (7) | (8) | ||||||||||||
| EDRV | Y | Y | Y (12) | ||||||||||||
| EZ Ethernet | Y | Y | Y | Y | Y | Y | |||||||||
| EZ EtherPLUS | Y | Y | Y | Y | Y | Y | Y | ||||||||
| WinPLC | Y | ||||||||||||||
| Software | DirectSOFT | Y | Y | Y | Y | Y | Y | ||||||||
| DS Data | Y | Y | Y | Y | Y | Y | |||||||||
| Ethernet SDK | Y (9) | Y | Y | Y (9) | Y | Y | |||||||||
| NetEdit | Y (10) | Y (11) | Y (10) | Y (11) | |||||||||||
(1)
Not an industry standard. However, protocol is available for 3rd-party
development upon request.
(2) Not really a distinct protocol. This setting is used
to intelligently pick K-sequence or DirectNet as needed by the
hardware/software.
(3) Used when doing ECOM-to-ECOM via RX/WX instructions
with RX/WX Node Map configured in sending ECOM.
(4) Used when doing ECOM-to-PC (Report-by-Exception) via
RX/WX instructions (Address 90 only) with ECOM's dipswitch 7 set ON.
(5) Used when doing ECOM-to-ECOM via RX/WX instructions
without RX/WX Node Map configured in sending ECOM.
(6) RX/WX Node Map must be configured in ECOM.
(7) ERM can talk to one slave with UDP/IP and another
with IPX simultaneously.
(8) No longer in planning (i.e.
canceled).
(9) Requires K-sequence protocol spec (request from
Automation Direct)
(10) Uses K-sequence to perform "Test CPU Access!"
function.
(11) Uses this protocol to perform "Show Base
Contents..." function.
(12) The older HA-EDRV2 cannot talk Modbus TCP.
EDRV FAQ0008 (see also NetEdit FAQ0011; EBC
FAQ0004; ECOM FAQ0034; ERM FAQ0024; PBC FAQ0015)
06-Jan-2015
Q: Getting various errors when attempting to update the
booter/firmware for my EBCs, ECOMs, EDRVs and ERMs.
A: First make sure you isolate the device from all other tasks
(i.e. put the PLC in the STOP mode; stop HMI; isolate from busy
network traffic). Secondly, make sure you are using the latest version
of NetEdit3 which can be downloaded for free here:
http://www.hosteng.com/SW-Products/NetEdit3.zip
Here are some common problems experienced:
EDRV FAQ0009 (see also Do-more
FAQ0038; CTRIO FAQ0046; EBC FAQ0047; ECOM FAQ0036; ERM FAQ0030; EZ
Ethernet FAQ0018; PBC FAQ0009; PSCM FAQ0001; WinPLC FAQ0018;
NetEdit FAQ0014; MB-GATEWAY FAQ0003)
13-Dec-2017
Q: What software tool do I use to upgrade/downgrade my Host
Engineering hardware?
A: Refer to the following:
| Host Hardware | Part Number | Firmware/Booter Upgrade Tool |
|
CTRIO CTRIO2 |
H0-CTRIO H4-CTRIO H0-CTRIO2 |
CTRIO
Workbench |
|
H2-CTRIO
T1H-CTRIO H2-CTRIO2 T1H-CTRIO2 |
CTRIO
Workbench or Do-more Designer |
|
| DM1 DM1E |
BX-DM1-x BX-DM1E-x H2-DM1 H2-DM1E T1H-DM1 T1H-DM1E |
Do-more Designer |
| EBC EBC100 |
H2-EBC H4-EBC T1H-EBC T1H-EBC100 H2-EBC100 |
NetEdit3 |
| ECOM ECOM100 |
H0-ECOM H2-ECOM H4-ECOM H0-ECOM100 H2-ECOM100 |
|
| ECOMLT (POM) |
BX-P-ECOMLT | |
| EDRV EDRV100 |
GS-EDRV GS-EDRV100 |
|
| ERM ERM100 |
H2-ERM H4-ERM H2-ERM100 |
NetEdit3
or ERM Workbench |
| EZ Ethernet | EZ
Ethernet EZ EtherPLUS |
EZ Touch |
| MB-GATEWAY | MB-GATEWAY | NetEdit3 |
| PBC | H2-PBC | |
| PSCM |
H0-PSCM
H2-PSCM
|
|
| WinPLC | WinPLC | WinPLC Workbench |
NOTE: All the firmware for the above products can be downloaded using NetEdit3's File --> Live Update... The firmware files are stored in c:\HAPTools\Images folder, or in the case of the Do-more PLCs, under the Images subfolder in the Do-more Designer's installation Bin folder.
EDRV FAQ0010 (see also DS Data FAQ0087;
DirectSOFT FAQ0180; NetEdit FAQ0012; EBC FAQ0052; ECOM FAQ0040; ERM
FAQ0034; EZ Ethernet FAQ0026)
27-Apr-2004
Q: Getting various errors when attempting to use NetEdit to see or
establish a link to a Host Ethernet device.
A: Here are know errors and their suggested solutions:
CAUTION: You may want to consult your Network Administrator before doing any of the solutions below! He/she may not want you to change your PC's setup at all!
(5) "Error reading
configuration values from device."
First of all, there was a bug in
versions of NetEdit previous to v3.1, that when you pressed the
Query Network button this error could pop up. If this is the case
then you just need to download a later copy (at least v3.1) of
NetEdit from our website. If this is not the case then
notoriously, this error is caused by one of the following:
If none of these things fix the
problem, then it is possible that the EBC/ECOM/EDRV/ERM/EZ Ethernet
device is defective and you may need to send it in for repair.
EDRV FAQ0011 (see also NetEdit FAQ0004; EBC
FAQ0078; ECOM FAQ0025; ERM FAQ0052; EZ Ethernet FAQ0007)
27-Jan-2010
Q: Can retries and timeout values for NetEdit be adjusted to allow
it to find Host Ethernet devices on much slower networks?
A: No, but we will probably include this ability in future
releases of NetEdit (greater than v3.7). Currently NetEdit sends out a
broadcast and waits 600 ms for devices to respond. If the devices take
longer than this to respond they will be missing from his list. After
the responses are gathered, NetEdit makes a list and then polls each
device in the list one at a time to get detailed data, but waits only
250 ms for response from each device. If the device takes longer than
this to respond some of its data may be missing. This is not a problem
on a normal wired network, but can be a problem on a wireless network
or across the Internet where responses can inadvertently be long and
inconsistent. Also, since a broadcast is used, any device between
NetEdit and the Host Ethernet modules that block broadcasts can
prevent NetEdit from seeing anything.
EDRV FAQ0012 (see also DirectSOFT FAQ0183;
DS Data FAQ0093; EBC FAQ0057; ECOM FAQ0043; ERM FAQ0037; EZ Ethernet
FAQ0027; NetEdit FAQ0017)
27-Sep-2010
Q: How can I install IPX protocol for my NIC?
A: You can find instructions on how to do this for your
particular operating system by going to Start --> Help &
Support and searching for "Install NWLink." Below are the instructions
from Microsoft for doing this on a WinXP PC. The instructions are
similar for other operating systems (e.g. WinNT, Win98, WinME, Win2K).
To install NWLink IPX/SPX/NetBIOS
Compatible Transport Protocol
(1) Open Network Connections:
(a) Click Start
--> Settings --> Control Panel.
(b) Double-click Network
Connections.
NOTE: You must be a
member of the Administrators group to install protocols. Also, when
IPX is installed it is installed for all your connections. If you
don't want it installed for a certain connection, then right-click
that connection, click Properties and, on either the General
or Networking tab, clear the NWLink IPX/SPX/NetBIOS
Compatible Transport Protocol check box.
(2) Right-click a local area connection, then click Properties.
(3) On the General tab, click Install.
(4) In the Select Network Component Type dialog box,
click Protocol, and then click Add.
(5) In the Select Network Protocol dialog box, click NWLink
IPX/SPX/NetBIOS
Compatible Transport Protocol, and then click OK.
IMPORTANT: The IPX/SPX protocol is not available on
WinXP 64-Bit Edition, WinVista or Win7.
EDRV FAQ0013 (see also EBC FAQ0059; ECOM
FAQ0051; ERM FAQ0040; EZ Ethernet FAQ0028; NetEdit FAQ0022)
22-Sep-2005
Q: I inadvertently changed the IP address of my Host Engineering
Ethernet device and now NetEdit cannot find it, nor can I ping it.
How can I get it "back?"
A: It can be changed using IPX protocol:
EDRV FAQ0014 (see also ERM FAQ0041; EBC FAQ0060)
28-Sep-2005
Q: In ERM Workbench, what do the colors of the slave numbers in the
Slave Status box mean?
A: Colors indicate slave status of a particular slave:
| COLOR | DESCRIPTION |
| Grey | Slave not configured. |
| Green | Slave configured and ERM successfully communicating with it. |
| Yellow | Slave configured and ERM successfully communicating with it, but the slave has an error in its I/O. |
| Red | Slave configured but ERM cannot communicate with it. |
EDRV FAQ0015 (see also EBC FAQ0061; ECOM
FAQ0052; ERM FAQ0042; EZ Ethernet FAQ0029; HA-TADP FAQ0005; WinPLC
FAQ0028)
29-Sep-2005
Q: Do any of your Ethernet devices support the next generation of
Internet (IPv6)?
A: No; nor do we have any plans to implement it at this
time.
EDRV FAQ0016
08-Aug-2013
Q: When the GS-EDRV or GS-EDRV100 is connected to the drive, the
drive display flashes "cE03" ("Illegal data value") or "Data
Invalid" error.
A: First make sure the following 2 drive parameters are set
properly:
P3.00 (Source of Operation Command)
= 03 (Operation determined by RS232/RS485
interface. Keypad STOP is enabled), or...
04
(Operation determined by RS232/RS485 interface. Keypad STOP is
disabled)
P4.00 (Source of Frequency Command) = 05 (Frequency determined by RS232/RS485 communication interface.
If these are set properly, then this error is probably caused by incompatible versions of GS3 firmware and the GS-EDRV firmware. Solutions:
If you need the older GS-EDRV firmware, please send an e-mail to support@hosteng.com.
EDRV FAQ0017 (see also EBC FAQ0065; ECOM
FAQ0053)
20-Feb-2009
Q: Using a 3rd-party Modbus TCP master (e.g. Wonderware), when
multiple requests are sent to the ECOM100, EBC100, or EDRV,
sometimes some of the packets timeout.
A: The firmware of these devices were originally set up to do one
transaction at a time. Multiple requests to different TCP port numbers
was not a problem. This problem was fixed in:
H0-ECOM100 firmware version 4.0.52 (or
later)
H2-ECOM100 firmware version 4.0.999 (or later)
H2-EBC100 firmware version 4.0.464 (or later)
T1H-EBC100 firmware version 4.0.1309 (or later)
GS-EDRV firmware version 1.1.267 (or later)
EDRV FAQ0018 (see also EBC FAQ0069; ECOM
FAQ0055; ERM FAQ0044; EZ Ethernet FAQ0030; HA-TADP FAQ0006; WinPLC
FAQ0032)
15-Nov-2005
Q: What types of Ethernet framing do your Ethernet products
support?
A: All our Ethernet products (ECOM, ECOM100, EBC, EBC100, EDRV,
ERM, EZ Ethernet, EZ EtherPLUS, HA-TADP and WinPLC) all support the
following types of Ethernet framing:
EDRV FAQ0019 (see also EBC FAQ0070; ECOM
FAQ0061; ERM FAQ0045; EZ Ethernet FAQ0031; HA-TADP FAQ0007; WinPLC
FAQ0033)
22-Feb-2005
Q: Are the Host Engineering Ethernet products compliant to AS ISO
15745?
A: No.
EDRV FAQ0020 (see also ERM FAQ0053)
03-Jun-2008
Q: Why aren't all the drive parameters mapped in the EDRV when used
with ERM?
A: When using the EDRV with an ERM, we had to chose to map only
the most frequently used ones in order to save on network and scan
time simply because there are an abundance of drive parameters.
There are 2 possible ways to access non-mapped parameters in the drive:
EDRV FAQ0021 (see also ECOM FAQ0067)
01-Apr-2005
Q: Can't get my ECOM100 as a Modbus TCP Client (master) to
communicate properly to my GS-EDRV.
A: This is a bug in the ECOM100 firmware. Firmware that fixes this
problem is:
H0-ECOM100 v4.0.52 (or later)
H2-ECOM100 v4.0.914 (or later)
EDRV FAQ0022 (see also ERM FAQ0049)
17-May-2007
Q: When using the HA-EDRV with an H2-ERM or H4-ERM, sometimes one
or more of the Output Words seems to stop updating and working
correctly.
A: This is a bug in the HA-EDRV firmware v1.0.121 and earlier. The
problem is fixed in:
HA-EDRV firmware v1.0.128 and later
EDRV FAQ0023 (see also NetEdit FAQ0032;
EBC FAQ0076; ECOM FAQ0092; ERM FAQ0050)
23-May-2007
Q: Can firmware upgrades be performed over a remote network (e.g.
over the Internet)?
A: Not normally, no. The reason is because NetEdit must be able
to see the Host Ethernet device in his list. The list is compiled by
NetEdit sending out a broadcast and having all the Host Ethernet
devices respond. Since the Internet will block all broadcasting, then
the list will always be blank. However, it is possible to configure a
VPN (Virtual Private Network) between the locations and configure the
VPN in such a way as to allow broadcasting.
EDRV FAQ0024 (see also ERM FAQ0054)
06-Oct-2008
Q: Input Word 3 (IW3) of my EDRV (mapped through an ERM) does not
indicate External Fault (EF).
A: This is usually because there is a misunderstanding of what is
meant by "External Fault" with regards to drive parameter
P9.29. An External Fault (EF) can be manually triggered in 2 ways:
1.
Drive digital input: By default, shorting the DCM terminal
to DI3 causes an EF which can be reset using the Reset button on the
drive keypad. An EF triggered in this manner is not
indicated in drive parameter P9.29.
2. Serial
communication
partner: A serial communication device can write a 1 to
P9.29 to manually trigger an EF in the drive, or write a 1 to P9.30 to
reset the EF.
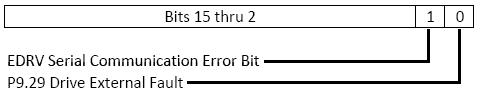
Now, to construct IW3, the EDRV merely reads drive parameter P9.29 (External Fault [triggered by serial communication device]) and then ORs that value with its own Serial Communications Fault Bit. Thus:
IW3:
Thus, possible values for IW3 are be:
| IW3 (value in decimal) |
EDRV Serial Comm Fault? |
External
Fault? |
| 0 |
No |
No |
| 1 |
No |
Yes |
| 2 |
Yes |
No |
| 3 |
Yes |
Yes |
EDRV FAQ0025 (see also ERM
FAQ0055)
30-Sep-2008
Q: Input Word 4 (IW4) of my EDRV (mapped through an ERM) does not
clear to zero (0) when the drive fault is cleared.
A: This is because IW4 is not actually the "Status Monitor" (i.e.
2100 hex, or Modbus Address 8448). Instead, IW4 is merely reading
P6.31 (Present Fault Record).
If you wish to monitor for an error on the drive, it is best to use the ERM Slave Status Bits (mapped to X300 - X317 by default).
EDRV FAQ0026 (see also ERM
FAQ0056; EBC FAQ0081)
25-Mar-2009
Q: Trying to use the example in B-2 of the ERM Manual to reset
errors in the EDRV and EBC/EBC100, but X330 (ERM Disable Request
Bit) of the ERM Status Word never comes ON.
A: This is a bug in older versions of the ERM firmware.
The ERM Status Word contains the current ERM Error Code in the LSByte and the Status Bits in the MSByte. Currently, only bit 8 (X330) is used in the MSB designating the ERM is disabling a Slave. Earlier versions of the ERM firmware was incorrectly handling this feedback bit. This is fixed in the following firmware:
H2-ERM
v1.1.19 (or later)
H4-ERM v1.1.19 (or later)
EDRV FAQ0027 (see also CTRIO FAQ0045; DirectSOFT
FAQ0132; DL Plus FAQ0010; DNLoader FAQ0011; DS Data FAQ0102; EBC
FAQ0083; ECOM FAQ0084; ERM FAQ0058; EZ Ethernet FAQ0010; General
FAQ0004; HA-TADP FAQ0008; Lookout Direct FAQ0015; NetEdit FAQ0037; PBC
FAQ0014; PSCM FAQ0003; SDK FAQ0022; SERIO FAQ0004; WinPLC FAQ0038)
31-Dec-2009
Q: What is the export classification of your products (e.g. ECCN)
A: None of our products have an ECCN. Automation Direct sells our
products and they export EAR99 NLR (No License Required). ECCN
is Export Controlled Classification Number and none of our
products are controlled.
EDRV FAQ0028 (see also ECOM FAQ0099; EBC
FAQ0085; EZ Ethernet FAQ0013)
19-May-2010
Q: Do Host Ethernet devices use full- or half-duplex
communications?
A: Half-duplex, allowing alternating transmission in 2
directions, but not in both directions simultaneously.
EDRV FAQ0029 (see also ECOM FAQ0114, EBC
FAQ0086, ERM FAQ0060, EZEthernet FAQ0032, NetEdit FAQ0040)
11-Feb-2011
Q: What do the Ethernet Stats at the bottom of NetEdit
specifically mean?
A: These are stats that are reported up to the firmware from
the hardware communication components. They are technically defined
as:
Missed Fr - "Missed Frames" - A count of the packets missed due to overruns, unavailable buffers or a disabled receiver.
TX Coll - "Transmit Collisions" - A count of the packets which had a late collision while being received.
Lost Pkts - "Lost Packets" - A count of the packets discarded because they were too long or too short.
Bad Pkts - "Bad Packets" - A count of the packets which have bad CRCs (checksums).
Unknown - A count of the packets which contain invalid symbols, extra bits or resulted in a receiver overrun condition.
TX Errors - "Transmit Errors" - A count of the packets which could not be sent because the transmitter was unavailable for an extended period of time.
These fixes are in:
H2-EBC100 v4.0.490 (or later)| MODULE | FIRMWARE RELEASE |
*DIPSWITCH | |||||||
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 | ||
| H0-ECOM | v1.0.354 | RBE | Module ID | ||||||
| v1.0.364 | **Protect | Module ID | |||||||
| H0-ECOM100 | v4.0.49 | RBE/IBox | *Recover | Module ID | |||||
| v4.0.320 | **Protect | Module ID | |||||||
| H2-ECOM H2-ECOM-F H4-ECOM H4-ECOM-F |
v1.0.7 | Module ID | |||||||
| v1.0.147 | RBE | Module ID | |||||||
| v1.0.227 | **Protect | Module ID | |||||||
| H2-ECOM100 H4-ECOM100 |
v4.0.877 |
RBE/IBox | *Recover | Module ID | |||||
| v4.0.1735 | **Protect | Module ID | |||||||
| H2-ERM H2-ERM-F H4-ERM H4-ERM-F |
v1.1.1 | Module ID | |||||||
| H2-ERM100 H4-ERM100 |
v4.0.73 | *Recover |
Module ID | ||||||
| H2-EBC H2-EBC-F |
v2.1.80 | Module ID | |||||||
| H2-EBC100 | v4.0.447 | *Recover | Module ID | ||||||
| H4-EBC H4-EBC-F |
v2.1.1 | Module ID | |||||||
| T1H-EBC | v1.0.386 | ||||||||
| T1H-EBC100 | v4.0.1260 | *Recover | |||||||
| GS-EDRV | v1.1.24 | Module
ID |
|||||||
| GS-EDRV100 | v5.0.218 | *Recover |
Module
ID |
||||||
| MB-GATEWAY | v1.0.601 | *Recover |
Stop
Bits |
Parity |
Baudrate |
||||

But by use of these Block Transfer
Parameters, all 3 of these could be written to with one telegram.

In the GS-Drives, the mapping of these parameters is generally the same for the GS1, GS2, and GS3 drives, but quite a bit different in the GS4. The mapping looks like this:
| Drive Parameter | GS1(1) | GS2(1) | GS3(1) | GS4(2) |
| P9.09 | Block
Transfer Parm 1 |
|||
| P9.10 | Block
Transfer Parm 2 |
|||
| P9.11 |
Block Transfer Parm 1 |
Block
Transfer Parm 3 |
||
| P9.12 |
Block Transfer Parm 2 |
Block
Transfer Parm 4 |
||
| P9.13 |
Block Transfer Parm 3 | Block
Transfer Parm 5 |
||
| P9.14 |
Block Transfer Parm 4 |
Block
Transfer Parm 6 |
||
| P9.15 |
Block Transfer Parm 5 |
Block
Transfer Parm 7 |
||
| P9.16 |
Block Transfer Parm 6 |
Block
Transfer Parm 8 |
||
| P9.17 |
Block Transfer Parm 7 |
Block
Transfer Parm 9 |
||
| P9.18 |
Block Transfer Parm 8 |
Block
Transfer Parm 10 |
||
| P9.19 |
Block Transfer Parm 9 |
Block
Transfer Parm 11 |
||
| P9.20 |
Block Transfer Parm 10 |
Block
Transfer Parm 12 |
||
| P9.21 |
Block Transfer Parm 11 |
Block
Transfer Parm 13 |
||
| P9.22 |
Block Transfer Parm 12 |
Block
Transfer Parm 14 |
||
| P9.23 |
Block Transfer Parm 13 |
Block
Transfer Parm 15 |
||
| P9.24 |
Block Transfer Parm 14 |
Block
Transfer Parm 16 |
||
| P9.25 |
Block Transfer Parm 15 |
|||
NOTES:
(1) To set the pointers for these
locations, it must be done manually from the GS drive's keypad.
(2) To set the pointers for
these locations, it can be done manually, or by writing the pointer to
P9.69 through P9.84 respectively
Notice how the GS4 shifted these up
two locations, and also has one more parameter to work with (16
instead of just 15 like the GS1, GS2, and GS3.)
When used with the GS-EDRV100 in a Do-more PLC these Block Transfer
Parameters are mapped into the Do-more PLC's GS-EDRV100 device memory
structure when you configure the GS-EDRV100 as a Do-more Ethernet I/O
slave.
How to normally use with GS1, GS2, and GS3 without
Do-more:
How to use with GS4 without Do-more:
How
Do-more uses GS-Drives: Unless you are going to
manage the Modbus communications manually to the drives, then an
easier way to use the GS-Drives with a Do-more PLC is to use a
GS-EDRV100 for each drive. Then in the Do-more PLC utilize the
Ethernet I/O built-in port and enslave each GS-EDRV100.
In this manner, automatic communications are established, and
the more-commonly-used drive parameters are automatically
mapped to the structure memory of the Do-more PLC for easy
read/write (output frequency, status monitor 1 & 2, run command,
etc). Also, nearly any drive parameter can be read from or written to
using the GSREGWR and GSREGRD instruction. Here is a
list of the GS-EDRV100 Do-more structure memory members and their
corresponding GS-Drive parameters:
| Structure Member | Size(*) | GS1 | GS2 | GS3 | GS4 |
| .OutputFrequency | Word/RO | / 48452 |
|||
| .OutputCurrent | Word/RO | / 48453 |
|||
| .StatusMonitor1 | Word/RO | P6.31 / 48449 |
|||
| .StatusMonitor2 | Word/RO | / 48450 |
|||
| .RunCommand | Word/RW | P9.27 / 42332 |
|||
| .RS485SpeedRef | Word/RW | P9.26 / 42331 |
|||
| .ExtCommFault | Bit/RO | P9.29 / 42334 |
|||
| .IntCommFault | Bit/RO | <GS-EDRV100> |
|||
| .Direction | Bit/RW | P9.28 / 42333 |
|||
| .ResetCommFault | Bit/RW | P9.30 / 42335 |
|||
| .BlockParm1 | Word/RW | P9.11 / 42316 |
P9.09 / 42314 | ||
| .BlockParm2 | Word/RW | P9.12 / 42317 |
P9.10 / 42315 | ||
| .BlockParm3 | Word/RW | P9.13 / 42318 |
P9.11 / 42316 | ||
| .BlockParm4 | Word/RW | P9.14 / 42319 |
P9.12 / 42317 | ||
| .BlockParm5 | Word/RW | P9.15 / 42320 |
P9.13 / 42318 | ||
| .BlockParm6 | Word/RO | P9.16 / 42321 |
P9.14 / 42319 | ||
| .BlockParm7 | Word/RO | P9.17 / 42322 |
P9.15 / 42320 | ||
| .BlockParm8 | Word/RO | P9.18 / 42323 |
P9.16 / 42321 | ||
| .BlockParm9 | Word/RO | P9.19 / 42324 |
P9.17 / 42322 | ||
| .BlockParm10 | Word/RO | P9.20 / 42325 |
P9.18 / 42323 | ||
| .BlockParm11 | Word/RO | P9.21 / 42326 |
P9.19 / 42324 | ||
| .BlockParm12 | Word/RO | P9.22 / 42327 |
P9.20 / 42325 | ||
| .BlockParm13 | Word/RO | P9.23 / 42328 |
P9.21 / 42326 | ||
| .BlockParm14 | Word/RO | P9.24 / 42329 |
P9.22 / 42327 | ||
| .BlockParm15 | Word/RO | P9.25 / 42330 |
P9.23 / 42328 | ||
| Word | P9.24 / 42329 | ||||
(*)
RO = Read Only, RW = Read/Write
Because the Structure Members are updated constantly with the regular I/O cycle, we chose to only make Block Parameters 1-5 as writable (pink background in above chart). The other ones (6-15) are read-only (light blue background in above chart). Thus to read and write these parameters only requires using them in Ladder logic (or Data View) as you would any other memory Element in the Do-more PLC.
